UltraDynamic® Linearmotor-Module
TurboPusher® Linearmotor-Module
Übersicht
UltraDynamic® und TurboPusher® stehen für ultra dynamische Kinematikdaten!
Getreu unserem Slogan 'Die Masse macht den Takt®' wurde beim Design von UltraDynamic®- und TurboPusher®-Modulen radikal auf die Reduktion der bewegten Massen und auf größtmögliche Steifigkeit geachtet. Durch den Einsatz von CFK-Technologie konnte gegenüber unserer HighDynamic® Serie die bewegte nicht motorische Masse um ca. 75 % - 80 % reduziert werden. Die Verwendung von Gleitführungstechnologie ermöglicht zudem Beschleunigungen von 250 m/s² (25 g) bei Spitzengeschwindigkeiten von 6 m/s.
UltraDynamic®- und TurboPusher®- Module sind mechanisch zu unserer HighDynamic® Serie kompatibel.
Wegen der verwendeten Gleitführungen sind die Module bevorzugt bei kleinen Nutzlasten und im Aussetzbetrieb zu verwenden.
Typische Anwendungen:
|
|


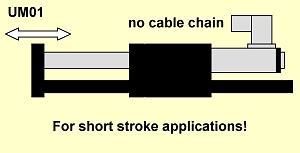
UltraDynamic® Linearmotor-Module UM01 - die schwarzen Sprinter
Produkteigenschaften:
- ultra dynamisch
- extrem kleine bewegte Massen
- max. Beschleunigung bis 250 m/s² (25 g)
- Vorschubgeschwindigkeit bis 6 m/s
- für Kurzhubanwendungen
- Baubreite 44 mm
- Hübe bis 160 mm
- Spitzenkräfte bis 137 N
- Wiederholgenauigkeit +/- 0,05 mm
- Einkabel-Technologie
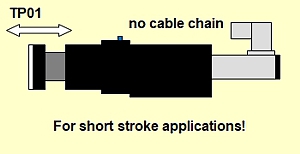
TurboPusher® Linearmotor-Module TP01 - die schnellen Schützen
Produkteigenschaften:
- ultra dynamisch
- sehr kleine bewegte Massen
- max. Beschleunigung bis 250 m/s² (25 g)
- Vorschubgeschwindigkeit bis 4 m/s
- kurzzeitiger Takt 1.200 min-1
- für Kurzhubanwendungen
- Baubreite 44 mm
- Hübe bis 80 mm
- Spitzenkräfte bis 137 N
- Wiederholgenauigkeit +/- 0,05 mm
- Sperrluft Anschluss
- Schutzart IP57
- Einkabel-Technologie
Positioniercontroller

Als Positioniercontroller für unsere UltraDynamic® und TurboPusher® Linearmotor-Module verwenden wir Controller aus dem LinMot® Programm.
Produkteigenschaften:
- 24 VDC Logikversorgung
- 48 - 72 VDC Leistungsversorgung
- 8 - 32 A Ausgangsstrom
- Anwahl von Positionieraufträgen mit frei definierbaren Verfahrprofilen über I/O's oder Feldbus
- Oszillationsbetrieb
- Positionssollwerteingang 0 - 10 V
- Puls- und Richtungseingänge
- Antriebe als Master-Booster oder als Gantry koppelbar
- elektronische Kurvenscheibe zur Leitachse
- Streaming Mode für Bahnkurven
- Eingang für externen hochauflösenden Positionssensor
- parametrierbare Referenzfahrmodi
- Safe Torque Off (STO)
- EtherCAT, POWERLINK, PROFINET, SERCOS III, TCP/IP, Profibus-DP, CANOpen, DeviceNet
- kostenloses Parametriertool LinMot-Talk
- Controller passend zu Motor und Applikation vorparametriert

UltraDynamic® Download-Center
Prospekte und Datenblätter
> UltraDynamic® UM01 Module Datenblatt
> TurboPusher® TP01 Module Datenblatt
Applikationshinweise
> Ausstoßen, separieren, sortieren im Produktfluss bei höchsten Taktzahlen
VideoClips
> #24 - UltraDynamic® UM01 Demonstration als Produktschieber
> #25 - UltraDynamic® UM01 im Dauertest mit höchster Dynamik
> #64 - TurboPusher® Modul TP01 Demonstration
Für die mechanische Konstruktion
> Linearmodule Maßblatt auf Anfrage
STEP-Dateien nur auf Anfrage!
Gerne legen wir Ihre Applikation vor Beginn
der Konstruktion kinematisch aus.
Sprechen Sie uns bitte an!
Für die elektrische Konstruktion
> siehe > Drives > LinMot® Download-Center
> Sichere Maschinensteuerung
Softwaretools
> LinMot-Talk siehe > Positioniercontroller Download-Center
Montage, Wartung und EG-Richtlinien
> Montageanleitung, Wartungsanleitung u. EG-Einbauerklärung für TP01
Copyrights
Unsere Texte, Bilder, Grafiken und VideoClips sind nach internationalem Urheberrecht geschützte Werke!
Fremde Warenzeichen siehe unser Copyright!